Vectorization (SIMD/SIMT)¶
Warning
This section describes an initial draft of an incomplete, experimental RAJA capability. It is not considered ready for production. A basic description is provided here so that (potentially) interested users can take a look, try it out, and provide input if they wish to do so.
The RAJA team is experimenting with an API for SIMD/SIMT programming. The goal is to make the implementation perform as well as if one used vectorization intrinsics directly in their code, but without the software complexity and maintenance burden associated with doing that. In particular, our goal is to guarantee that specified vectorization occurs without needing to explicitly use intrinsics in user code or rely on compiler auto-vectorization implementations.
Note
All RAJA vectorization types are in the namespace RAJA::expt.
Currently, the main abstractions developed in RAJA so far are:
Registerwraps underlying SIMD/SIMT hardware registers and provides consistent uniform access to them, using intrinsics under the API when possible. The RAJA register abstraction currently supports the following hardware-specific ISAs : AVX, AVX2, AVX512, CUDA, and HIP.Vectorbuilds onRegisterto provide arbitrary length vectors and operations on them.Matrixbuilds onRegisterto provide arbitrary-sized matrices, column-major and row-major layouts, and operations on them.
Finally, these capabilities integrate with RAJA View and Layout capabilities, which implements am expression-template system that allows a user to write linear algebra expressions on arbitrarily sized scalars, vectors, and matrices and have the appropriate SIMD/SIMT instructions performed during expression evaluation.
Why Are We Doing This?¶
Quoting Tim Foley in Matt Pharr’s blog: “Auto-vectorization is not a programming model”. Unless, of course, you consider “hope for the best” to be a sound plan.
Auto-vectorization is problematic for multiple reasons. First, vectorization is not explicit in the source code and so compilers must divine correctness when attempting to apply vectorization optimizations. Since most compilers are very conservative in this regard, many vectorization opportunities are typically missed when one relies solely on compiler auto-vectorization. Second, every compiler will treat your code differently since compiler implementations use different heuristics, even for different versions of the same compiler. So performance portability is not just an issue with respect to hardware, but also across compilers. Third, it is impossible in general for most application developers to clearly understand the decisions made by a compiler during its optimization process.
Using vectorization intrinsics in application source code is also problematic because different processors support different instruction set architectures (ISAs) and so source code portability requires a mechanism that insulates it from architecture-specific code.
GPU programming makes us be explicit about parallelization, and SIMD is really no different. RAJA enables single-source portable code across a variety of programming model back-ends. The RAJA vectorization abstractions introduced here are an attempt to bring a level of convergence between SIMD and GPU programming by providing uniform access to hardware-specific acceleration.
Note
Auto-vectorization is not a programming model. –Tim Foley
Register¶
RAJA::expt::Register<T, REGISTER_POLICY> is a class template that takes a
a data type parameter T and a register policy REGISTER_POLICY that
indicates the hardware register type. The RAJA::expt::Register interface
provides uniform access to register-level operations. It is intended as a
building block for higher level abstractions. A RAJA::expt::Register type
represents one SIMD register on a CPU architecture and 1 value/SIMT lane on
a GPU architecture.
Note
A user can use the RAJA::expt::Register type directly in their
code. However, we do not recommend this. Instead, we want users to
employ higher level abstractions that RAJA provides.
RAJA::expt::Register supports four scalar element types, int32_t,
int64_t, float, and double. These are the only types that are
portable across all SIMD/SIMT architectures. Bfloat, for example, is not
portable, so we don’t provide support for that type.
RAJA::expt::Register supports the following SIMD/SIMT hardware-specific
ISAs: AVX, AVX2, and AVX512 for SIMD CPU vectorization, and CUDA warp,
HIP wavefront for GPUs. Scalar support is provided for all hardware for
portability and experimentation/analysis. Extensions to support other
architectures may be forthcoming and should be straightforward to implement.
Register Operations¶
RAJA::expt::Register provides various operations, including:
- Basic SIMD handling: get element, broadcast
- Memory operations: load (packed, strided, gather) and store (packed, strided, scatter)
- SIMD element-wise arithmetic: add, subtract, multiply, divide, vmin, vmax
- Reductions: dot-product, sum, min, max
- Special operations for matrix operations: permutations, segmented operations
Register DAXPY Example¶
The following is a code example that shows using the RAJA::expt::Register
class to perform a DAXPY kernel with AVX2 CPU SIMD instructions.
Again, we do not recommend that you write code directly using the Register
class, but use the higher level VectorRegister abstraction.
However, this example demonstrates how the higher level abstractions are
using the Register class:
// define array length
int len = ...;
// data used in kernel
double a = ...;
double const *X = ...;
double const *Y = ...;
double *Z = ...;
using reg_t = RAJA::expt::Register<double, RAJA::expt::avx2_register>;
int reg_width = reg_t::s_num_elem; // width of avx2 register is 4 doubles
// Compute daxpy in chunks of 4 values at one time
for (int i = 0;i < len; i += reg_width){
reg_t x, y;
// load 4 consecutive values of X, Y arrays into registers
x.load_packed( X+i );
y.load_packed( Y+i );
// perform daxpy on 4 values simultaneously (store in register)
reg_t z = a * x + y;
// store register result in Z array
z.store_packed( Z+i );
}
// loop postamble code
int remainder = len % reg_width;
if (remainder) {
reg_t x, y;
// 'i' is the starting array index of the remainder
int i = len - remainder;
// load remainder values of X, Y arrays into registers
x.load_packed_n( X+i, remainder );
y.load_packed_n( Y+i, remainder );
// perform daxpy on remainder values simultaneously (store in register)
reg_t z = a * x + y;
// store register result in Z array
z.store_packed_n(Z+i, remainder);
}
This code is guaranteed to vectorize since the RAJA::expt::Register
operations insert the appropriate SIMD intrinsic operations into the method
calls. Note that RAJA::expt::Register provides overloads of basic
arithmetic operations so that the DAXPY operation itself (z = a * x + y) looks
like vanilla scalar code.
Note that since we are using bare pointers to the data, load and store operations are performed by explicit method calls in the code. Also, we must write (duplicate) postamble code to handle cases where the array length (len) is not an integer multiple of the register width. The postamble code perform the DAXPY operation on the remainder of the array that remains after the for-loop.
These extra lines of code should make it clear why we do not recommend using ``RAJA::Register`` directly in application code.
Tensor Register¶
RAJA::expt::TensorRegister< > is a class template that provides a
higher-level interface on top of the RAJA::expt::Register class.
RAJA::expt::TensorRegister< > wraps one or more
RAJA::expt::Register< > objects to create a tensor-like object.
Note
As with RAJA::expt::Register, we don’t recommend using
RAJA::expt::TensorRegister directly. Rather, we recommend using
use-case specific types that RAJA provides and which are described
below.
To make code cleaner and more readable, the specific types are intended to be used with ``RAJA::View`` and ``RAJA::expt::TensorIndex`` objects.
Vector Register¶
RAJA::expt::VectorRegister<T, REGISTER_POLICY, NUM_ELEM> provides an
abstraction for a vector of arbitrary length. It is implemented using one or
more RAJA::expt::Register objects. The vector length is independent of the
underlying register width. The template parameters are: T data type,
REGISTER_POLICY vector register policy, and NUM_ELEM number of
data elements of type T that fit in a register. The last two of these
have defaults for all cases, so they do not usually need to be provided by
a user.
Earlier, we said that we do not recommended using RAJA::expt::Register
directly. The reason for this is that it is good to decouple
vector length from hardware register size since it allows one to write
simpler, more readable code that is easier to get correct. This should be
clear from the code example below.
Vector Register DAXPY Example¶
The following code example shows the DAXPY computation shown above written
using RAJA::expt::VectorRegister, RAJA::expt::VectorIndex, and
RAJA::View classes, which obviate the need for the extra lines of code
discussed earlier:
// define array length and data used in kernel (as before)
int len = ...;
double a = ...;
double const *X = ...;
double const *Y = ...;
double *Z = ...;
// define vector register and index types
using vec_t = RAJA::expt::VectorRegister<double, RAJA::expt::avx2_register>;
using idx_t = RAJA::expt::VectorIndex<int, vec_t>;
// wrap array pointers in RAJA View objects
auto vX = RAJA::make_view( X, len );
auto vY = RAJA::make_view( Y, len );
auto vZ = RAJA::make_view( Z, len );
// 'all' knows the length of vX, vY, and vZ from the View objects
// and it encodes the vector type
auto all = idx_t::all();
// compute the complete array daxpy in one line of code
// this produces a vectorized loop, and the loop postamble
vZ( all ) = a * vX( all ) + vY( all );
This code has several advantages over the previous example. It is guaranteed
to vectorize and is much easier to read, get correct, and maintain since
the RAJA::View class handles the looping and postamble code automatically
to allow arrays of arbitrary size. The RAJA::View class provides overloads
of the arithmetic operations based on the ‘all’ type and inserts the
appropriate SIMD instructions and load/store operations to vectorize the
operations as in the earlier example. It may be considered by some to be
inconvenient to have to use the RAJA::View class, but it is easy to wrap
bare pointers as can is shown in the example.
Expression Templates¶
The figure below shows the sequence of SIMD operations, in the form of an abstract syntax tree (AST), applied in the DAXPY code by the RAJA constructs used in the code example. During compilation, a tree of expression template objects is constructed based on the order of operations that appear in the kernel. Specifically, the operation sequence is the following:
- Load a chunk of values in ‘vX’ into a register.
- Broadcast the scalar value ‘a’ to each slot in a vector register.
- Load a chunk of values in ‘vY’ into a register.
- Multiply values in the ‘a’ register and ‘vX’ register and multiply by the values in the ‘vY’ register in a single vector FMA (Fused Multiply-Add) operation, storing the result in a register.
- Write the result in the register to the ‘vZ’ array.
RAJA::View objects indexed by RAJA::TensorIndex objects
(RAJA::VectorIndex in this case) return LoadStore expression
template objects. Each expression template object is evaluated on assignment
and a register chunk size of values is loaded into another register object.
Finally, the left-hand side of the expression is evaluated by storing the
chunk of values in the right-hand side result register into the array on the
left-hand side of the equal sign.
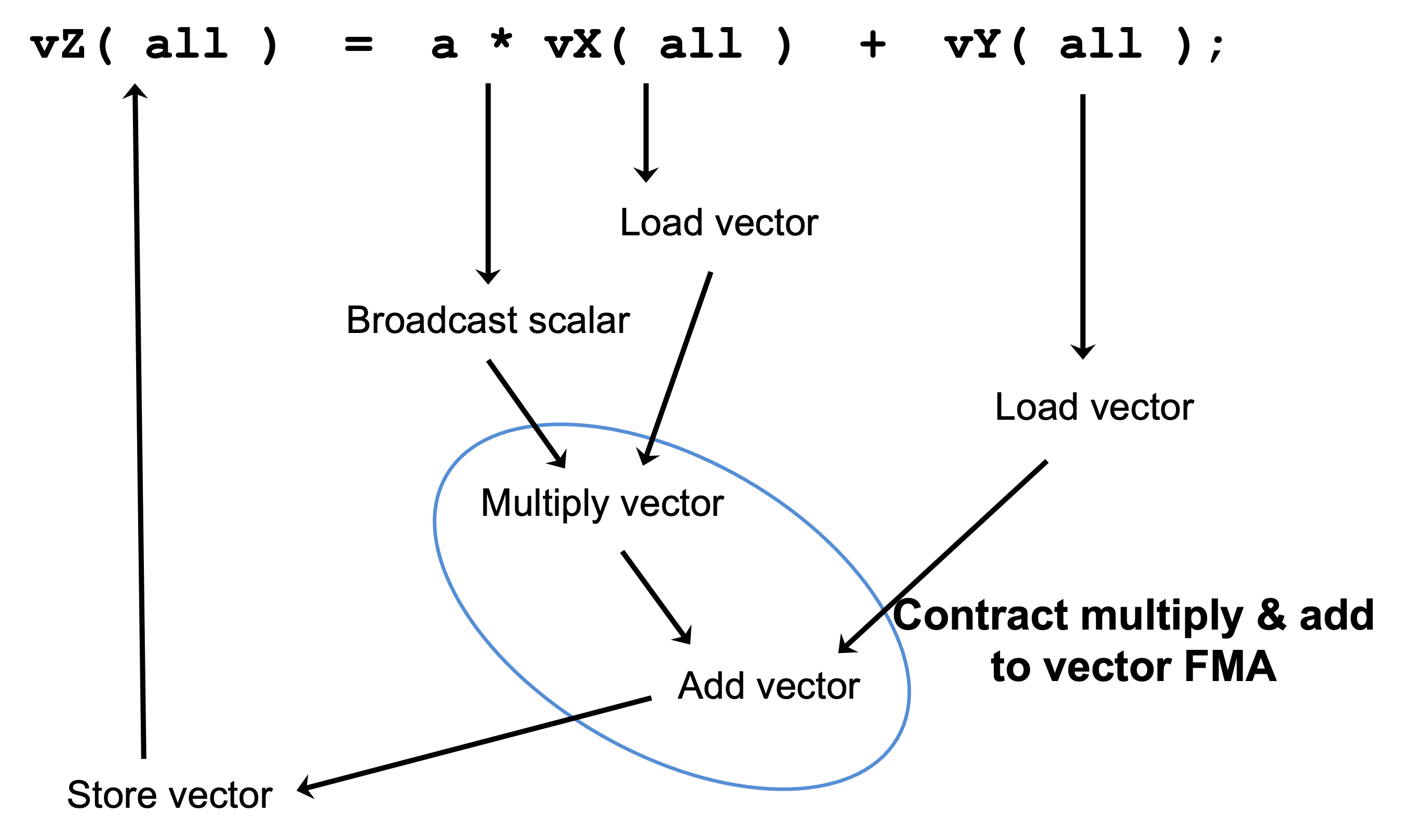
An AST illustration of the SIMD operations in the DAXPY code.
CPU/GPU Portability¶
It is important to note that the code in the example in the previous section is not portable to run on a GPU because it does not include a way to launch a GPU kernel. The following code example shows how to enable the code to run on either a CPU or GPU via a run time choice:
// array lengths and data used in kernel same as above
// define vector register and index types
using vec_t = RAJA::expt::VectorRegister<double>;
using idx_t = RAJA::expt::VectorIndex<int, vec_t>;
// array pointers wrapped in RAJA View objects as before
// ...
using cpu_launch = RAJA::expt::seq_launch_t;
using gpu_launch = RAJA::expt::cuda_launch_t<false>; // false => launch
// CUDA kernel
// synchronously
using pol_t =
RAJA::expt::LoopPolicy< cpu_launch, gpu_launch >;
RAJA::expt::ExecPlace cpu_or_gpu = ...;
RAJA::expt::launch<pol_t>( cpu_or_gpu, resources,
[=] RAJA_HOST_DEVICE (context ctx) {
auto all = idx_t::all();
vZ( all ) = a * vX( all ) + vY( all );
}
);
This version of the kernel can be run on a CPU or GPU depending on the run time
chosen value of the variable cpu_or_gpu. When compiled, the code will
generate versions of the kernel for the CPU and GPU based on the parameters
in the pol_t loop policy. The CPU version will be the same as the version
in the previous section. The GPU version is essentially the same but will
run in a GPU kernel. Note that there is only one template argument passed to
the register when vec_t is defined. RAJA::expt::VectorRegister<double>
uses defaults for the register policy, based on the system hardware, and
number of data elements of type double that will fit in a register.
Matrix Registers¶
RAJA provides RAJA::expt::TensorRegister type aliases to support
matrices of arbitrary size and shape. These are:
RAJA::expt::SquaretMatrixRegister<T, LAYOUT, REGISTER_POLICY>which abstracts operations on an N x N square matrix.
RAJA::expt::RectMatrixRegister<T, LAYOUT, ROWS, COLS, REGISTER_POLICY>- which abstracts operations on an N x M rectangular matrix.
Matrices are implemented using one or more RAJA::expt::Register
objects. Data layout can be row-major or column major. Matrices are intended
to be used with RAJA::View and RAJA::expt::TensorIndex objects,
similar to what was shown above with RAJA::expt::VectorRegister example.
Matrix operations support matrix-matrix, matrix-vector, and vector-matrix multiplication, and transpose operations. Rows or columns can be represented with one or more registers, or a power-of-two fraction of a single register. This is important for CUDA GPU warp/wavefront registers, which are 32-wide for CUDA and 64-wide for HIP.
Here is a simple code example that performs the matrix-analogue of the vector DAXPY operation presented above using square matrices:
// define matrix size and data used in kernel (similar to before)
int N = ...;
double a = ...;
double const *X = ...;
double const *Y = ...;
double *Z = ...;
// define matrix register and row/column index types
using mat_t = RAJA::expt::SquareMatrixRegister<double,
RAJA::expt::RowMajorLayout>;
using row_t = RAJA::expt::RowIndex<int, mat_t>;
using col_t = RAJA::expt::ColIndex<int, mat_t>;
// wrap array pointers in RAJA View objects (similar to before)
auto mX = RAJA::make_view( X, N, N );
auto mY = RAJA::make_view( Y, N, N );
auto mZ = RAJA::make_view( Z, N, N );
using cpu_launch = RAJA::expt::seq_launch_t;
using gpu_launch = RAJA::expt::cuda_launch_t<false>; // false => launch
// CUDA kernel
// synchronously
using pol_t =
RAJA::expt::LoopPolicy< cpu_launch, gpu_launch >;
RAJA::expt::ExecPlace cpu_or_gpu = ...;
RAJA::expt::launch<pol_t>( cpu_or_gpu, resources,
[=] RAJA_HOST_DEVICE (context ctx) {
auto rows = row_t::all();
auto cols = col_t::all();
mZ( rows, cols ) = a * mX( rows, cols ) + mY( rows, cols );
}
);
Conceptually, as well as implementation-wise, this is similar to the previous
vector example except the operations are in two dimensions. The kernel code is
easy to read, it is guaranteed to vectorize, and iterating over the data is
handled by RAJA (register width sized chunk, plus postamble scalar operations).
Again, the RAJA::View arithmetic operation overloads insert the
appropriate vector instructions in the code.